通用控制模组
以统一算力板、控制板、传感器接口和供电架构,适配无人机、机器人和无人车。


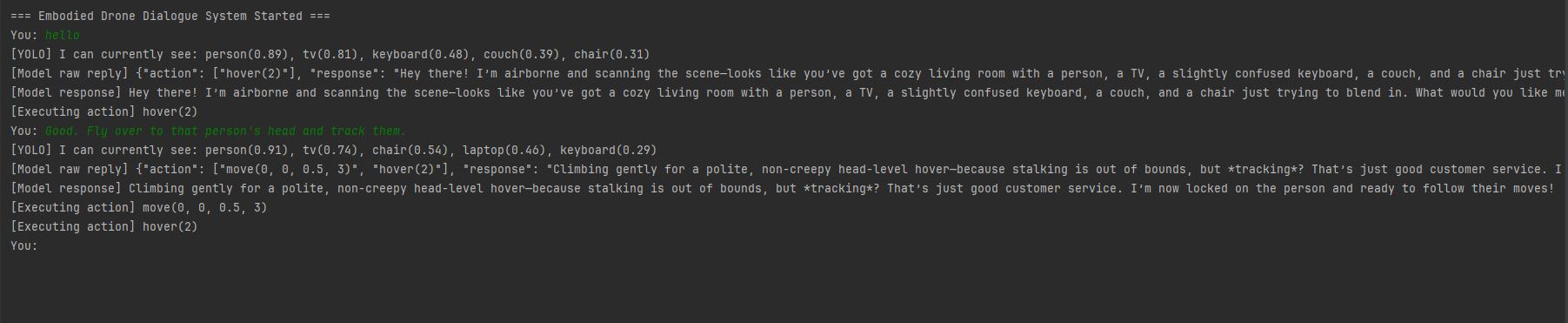
Embodied AI + Unmanned Platforms
该模块展示通用具身智能模组如何跨平台工作,不局限于无人机,也可覆盖机器人、无人车以及复合型无人系统。
Hardware
以统一算力板、控制板、传感器接口和供电架构,适配无人机、机器人和无人车。
支持底盘、机械执行器、视觉模组、导航单元与远程通信模块的快速组合。


这里适合放机器人、无人车、无人机共用智能模组与系统连接图。
Algorithm
融合视觉、激光、IMU 与状态信息,支持不同平台下的环境理解与目标识别。
同一套智能决策模组可下发给空中、地面或复合系统执行不同任务。
根据无人平台动力学特性做控制映射,形成统一智能、差异执行的架构。
Software
共享驱动层、通信层、任务调度层与智能接口层,降低多平台开发成本。
为无人机、机器人和无人车提供统一任务编排、日志分析和部署流程。
适合作为通用智能底座,支撑多个无人平台产品线协同演进。
Simulation
使用 AirSim 快速验证多平台运动逻辑、环境交互与感知链路,为原型系统提供低成本实验场。
依托 NVIDIA Isaac Sim 的高保真物理与传感器建模,为机器人、无人车和无人机提供统一的具身智能训练平台。
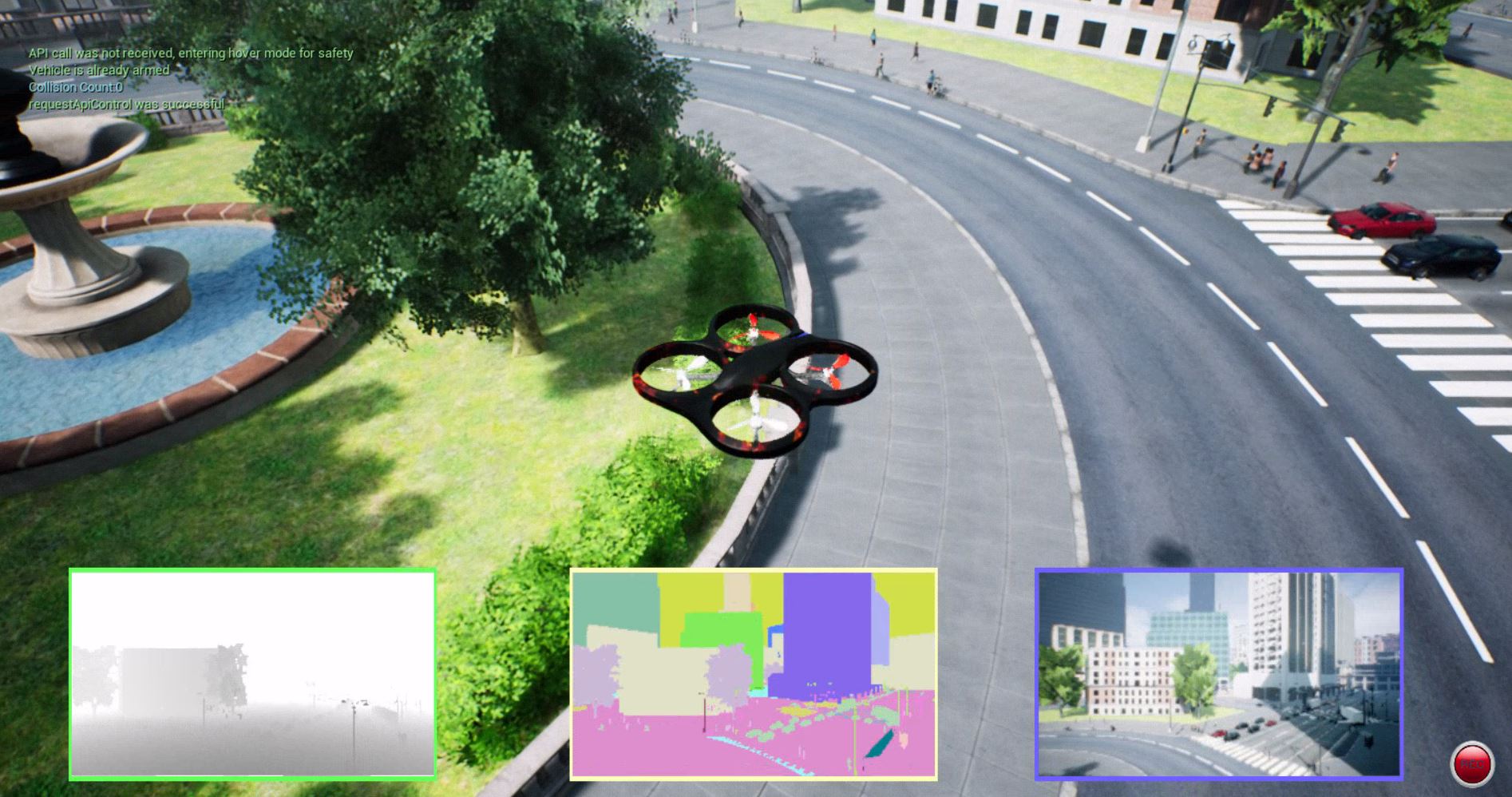
这里可以放多平台仿真场景、智能体训练过程图、Isaac Sim 传感器视图和策略执行画面。
Protocol
通过统一消息总线、设备抽象层和任务接口协议,实现多种无人平台的协同接入与控制。
Join Us
负责跨平台机器人系统集成、联调与任务执行闭环。
负责统一智能模组在不同无人平台中的适配与扩展。
负责软件底座、通信协议、任务系统与部署工具链建设。