机体平台
稳定机架、续航优先动力系统、实用型传感器与标准化接口设计。

Standard-Speed Embodied Drone
面向稳定巡检、自主作业、环境理解与产品化部署, 强调可靠飞行、低门槛复现、长时间任务运行与完整软件闭环。
Hardware
稳定机架、续航优先动力系统、实用型传感器与标准化接口设计。
飞控、算力板、通信模块、电池管理与任务载荷模块的低成本组合方案。


这里可以替换成普通速度无人机、巡检场景图、核心板卡图和载荷图。
Algorithm
用于建图、目标识别、场景理解与任务上下文获取的稳健感知算法。
路径规划、任务切换、目标点执行与巡检逻辑编排。
稳定控制、鲁棒跟踪、任务容错与安全机制联动。
Software
包括设备驱动、数据总线、任务调度、地面站接口和模型部署系统。
仿真验证、日志分析、远程调试、OTA 机制与版本管理流程。
服务于巡检、展示、研发验证与标准化产品迭代。
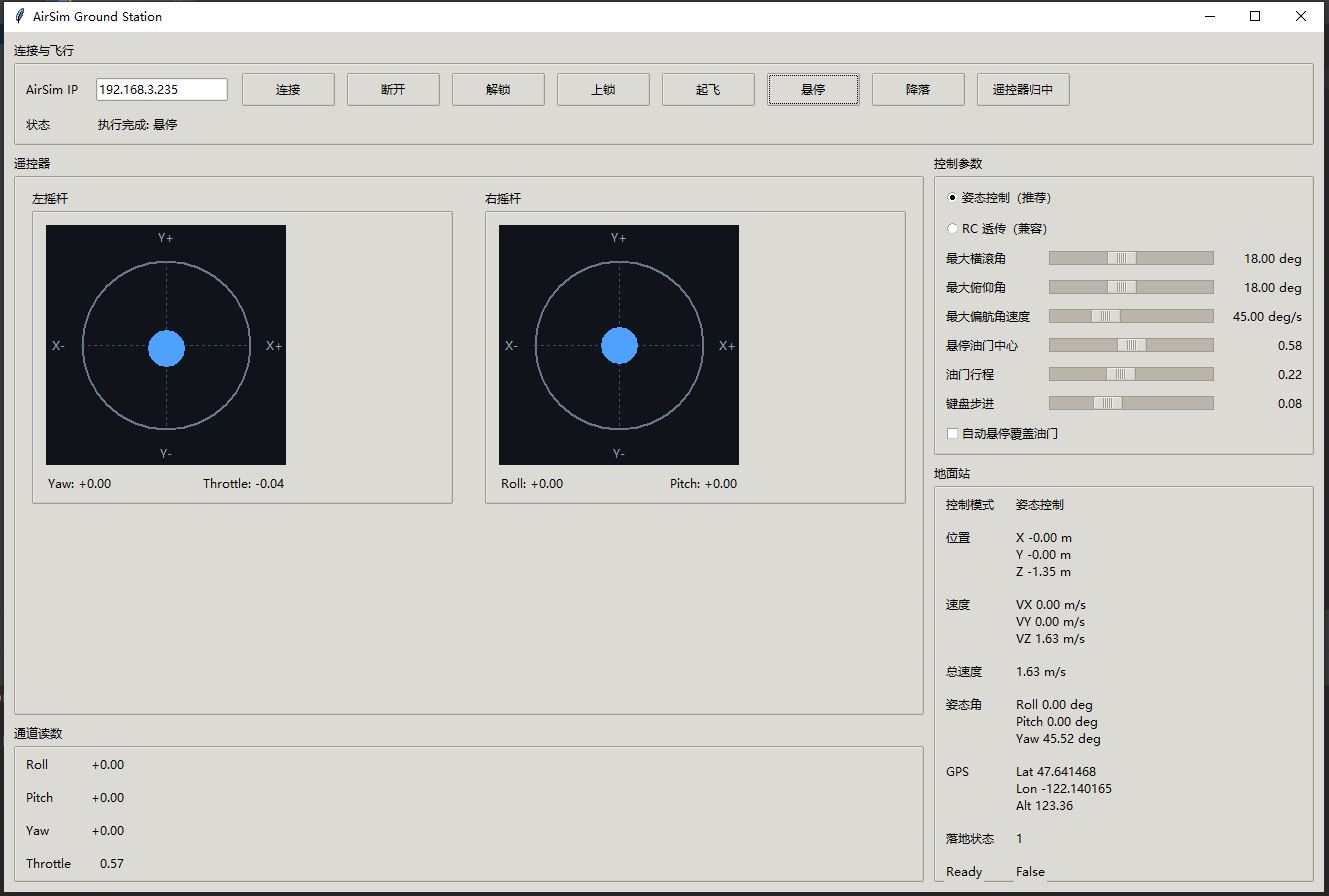
Simulation
在 AirSim 中验证巡检、路径执行、环境感知和基础控制逻辑,降低真实系统试错成本。
依托 NVIDIA Isaac Sim 完成高保真场景构建、具身智能训练、传感器模拟与仿真到实机迁移。
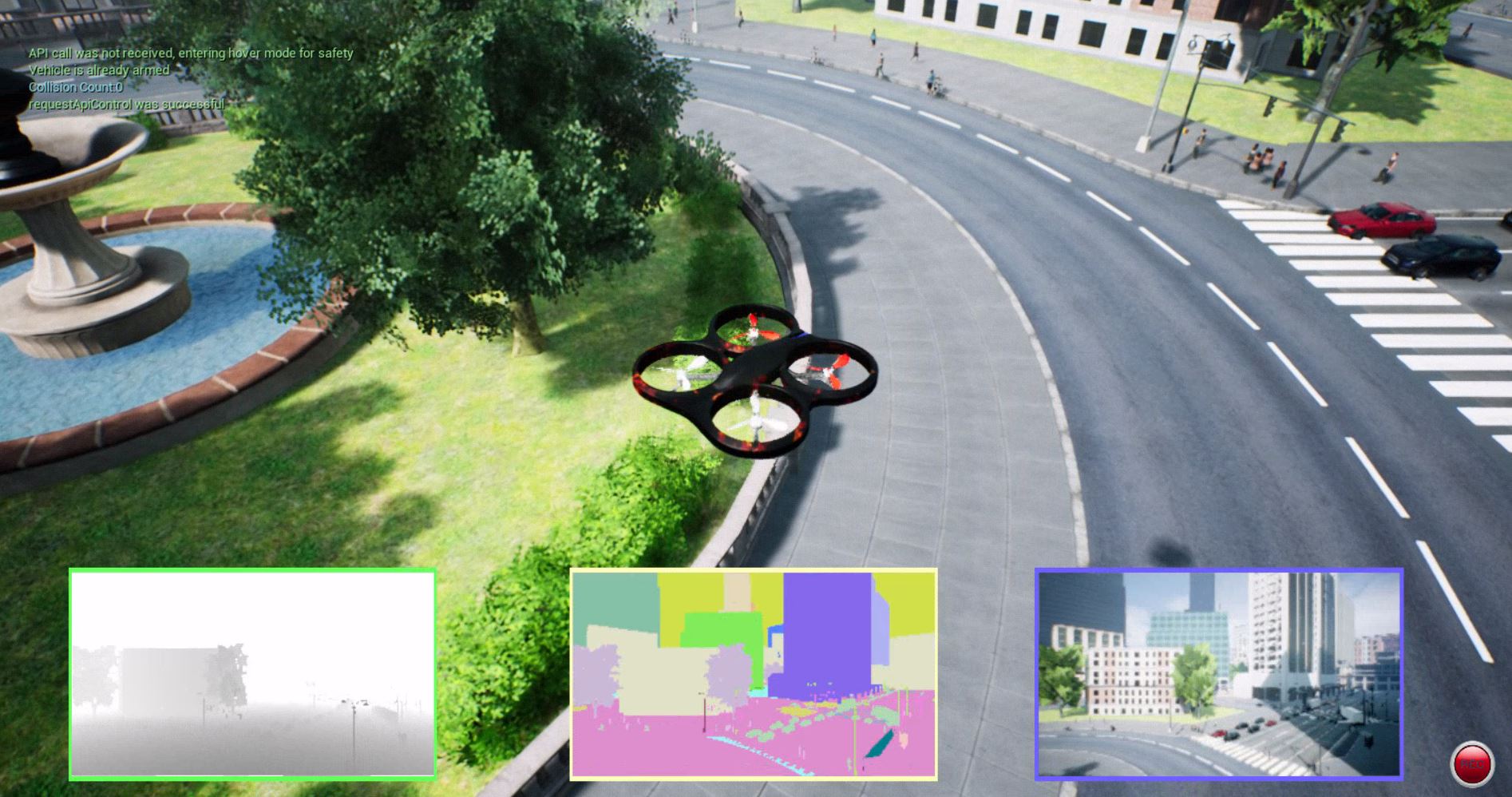
这里可以放巡检场景仿真图、Isaac Sim 训练环境、行为演示和模型部署前后的对比画面。
Protocol
聚焦稳定任务链路和工程接口统一,包括飞控协议、传感器通信、任务命令、云边协同与数据回传。
Join Us
负责任务框架、系统联调、数据闭环与部署工具建设。
负责整机平台、载荷集成、电源与通信方案优化。
负责感知理解、具身决策、行为策略与任务智能能力迭代。